ELF 学习笔记 01:基础结构篇
本系列笔记记录 ELF Reader 开发过程中的学习心得,从代码实践中理解 ELF 文件结构和动态链接机制。
系列导航:
步骤 1:ELF Header 解析
目标:理解 ELF 基本元数据(Magic、类型、架构、入口点、Header 位置)
实现文件:
app/src/main/cpp/elf_reader/elf_types.happ/src/main/cpp/elf_reader/elf_types.cppapp/src/main/cpp/elf_reader/main.cppapp/src/main/cpp/elf_reader/CMakeLists.txt
1.1 ELF 文件结构概览
ELF(Executable and Linkable Format)文件由以下几部分组成:
+----------------------------------+
| ELF Header | <-- 52 bytes (32-bit) / 64 bytes (64-bit)
| - 文件类型、架构、入口点 |
| - Section Header 偏移位置 |
| - Program Header 偏移位置 |
+----------------------------------+
| Program Header Table | <-- 段加载信息(运行时用)
| - PT_LOAD: 可加载段 |
| - PT_DYNAMIC: 动态链接信息 |
+----------------------------------+
| .text (代码) |
| .data (数据) |
| ... |
+----------------------------------+
| Section Header Table | <-- 节区信息(链接时用)
| - .dynsym: 动态符号表 |
| - .plt: 过程链接表 |
| - .got.plt: 全局偏移表 |
+----------------------------------+1.2 ELF Header 结构详解
1.2.1 e_ident[16] - 标识字节数组(16 bytes)
| 索引 | 名称 | 含义 |
|---|---|---|
| 0-3 | EI_MAG0-3 | Magic: 0x7f ‘E’ ‘L’ ‘F’ |
| 4 | EI_CLASS | 文件类别:1=32位, 2=64位 |
| 5 | EI_DATA | 数据编码:1=小端, 2=大端 |
| 6 | EI_VERSION | ELF 版本,固定为 1 |
| 7 | EI_OSABI | OS/ABI 类型:0=System V, 3=Linux |
| 8-15 | EI_PAD | 填充,保留 |
1.2.2 关键字段(64-bit ELF)
struct Elf64_Ehdr {
uint8_t e_ident[16]; // 标识信息
uint16_t e_type; // 文件类型:ET_DYN=动态库(so), ET_EXEC=可执行文件
uint16_t e_machine; // 目标架构:183=ARM64, 62=X86_64, 40=ARM
uint32_t e_version; // ELF 版本: 必须等于 e_ident[6] 的值
uint64_t e_entry; // 入口点虚拟地址(so 通常为 0)
uint64_t e_phoff; // Program Header 在文件中的偏移
uint64_t e_shoff; // Section Header 在文件中的偏移
uint32_t e_flags; // 处理器特定标志
uint16_t e_ehsize; // ELF Header 大小:64 bytes
uint16_t e_phentsize; // 每个 Program Header 条目大小
uint16_t e_phnum; // Program Header 条目数量
uint16_t e_shentsize; // 每个 Section Header 条目大小
uint16_t e_shnum; // Section Header 条目数量
uint16_t e_shstrndx; // 字符串表的 Section Header 索引
};1.3 字节序处理
ELF 文件可能使用大端或小端格式。在 elf_types.h 中实现了通用的读取函数:
// 小端读取:低位字节在低地址
template<typename T>
inline T readLE(const uint8_t* p) {
T val = 0;
for (size_t i = 0; i < sizeof(T); i++) {
val |= static_cast<T>(p[i]) << (i * 8);
}
return val;
}
// 大端读取:高位字节在低地址
template<typename T>
inline T readBE(const uint8_t* p) {
T val = 0;
for (size_t i = 0; i < sizeof(T); i++) {
val |= static_cast<T>(p[i]) << ((sizeof(T) - 1 - i) * 8);
}
return val;
}
// 根据 ELF 文件的字节序读取数据
template<typename T>
inline T readVal(const uint8_t* p, bool littleEndian) {
return littleEndian ? readLE<T>(p) : readBE<T>(p);
}1.4 运行测试
编译后推送到 Android 设备测试:
# 编译
./gradlew :app:externalNativeBuildDebug
# 推送并运行
adb push app/build/intermediates/cmake/debug/obj/arm64-v8a/elf_reader /data/local/tmp/
adb shell chmod +x /data/local/tmp/elf_reader
adb shell /data/local/tmp/elf_reader /system/lib64/libc.so1.5 学习要点总结
- Magic 识别:ELF 文件以
0x7f 'E' 'L' 'F'开头 - e_type = ET_DYN:共享库(.so)的类型是 DYN
- e_entry = 0:共享库没有固定的入口点
- e_shoff 和 e_phoff:Section Header 和 Program Header 的位置
- e_shstrndx:Section 名称字符串表的索引
步骤 2:Section Header 解析——摸清 so 的”部门架构”
目标:理解 Section Header Table,识别动态链接相关的关键 section
实现文件:
app/src/main/cpp/elf_reader/elf_sections.happ/src/main/cpp/elf_reader/elf_sections.cpp
测试结果:输出与 readelf -S 基本一致
2.1 从 Section Header 看 so 的”部门分工”
如果把 so 文件比作一家公司,各个 section 就是不同的部门:
| Section | 类型 | 运行时地址 | 部门职能 |
|---|---|---|---|
.dynsym | DYNSYM | 0x2f8 | 人事档案部:记录所有员工的姓名和职位(函数/变量符号) |
.dynstr | STRTAB | 0xc888 | 姓名数据库:存储所有员工的真实姓名字符串 |
.rela.plt | RELA | 0x17110 | 转接指南:记录”外部员工的分机号对应关系” |
.plt | PROGBITS | 0xef890 | 前台转接处:临时接待外来访客,负责转接 |
.got.plt | PROGBITS | 0xf6e50 | 电话簿:存储外部合作伙伴的实际电话号码 |
.text | PROGBITS | 0x54000 | 核心业务部:公司的实际业务代码 |
为什么 .got.plt 有 W 标志?
因为动态链接器需要在运行时修改 GOT 条目(电话号码会动态更新)。
2.2 sh_link:部门间的协作关系
Section Header 中的 sh_link 字段表示**“这个 section 依赖的另一个 section 的索引”**——要看懂我,你需要先看懂那个。
从 libc.so 看实际的链接关系
$ readelf -S /tmp/libc.so | grep -E "\.dynsym|\.dynstr|\.rela|\.dynamic|sh_link"[ 4] .dynsym DYNSYM ... sh_link=9 → 依赖 [9] .dynstr
[ 9] .dynstr STRTAB ... sh_link=0 → 无依赖(基础表)
[10] .rela.dyn RELA ... sh_link=4 → 依赖 [4] .dynsym
[11] .rela.plt RELA ... sh_link=4 → 依赖 [4] .dynsym
[22] .dynamic DYNAMIC ... sh_link=9 → 依赖 [9] .dynstr
[29] .symtab SYMTAB ... sh_link=31 → 依赖 [31] .strtab
逐个解析依赖关系
1. .dynsym → .dynstr(sh_link=9)
.dynsym[1129].st_name = 0x1234
│
└─ 去 .dynstr + 0x1234 处读取字符串
↓
得到 "malloc"符号表只存数字索引,真正的字符串存在 .dynstr。没有 .dynstr,.dynsym 只是一堆无意义的数字。
2. .rela.plt → .dynsym(sh_link=4)
.rela.plt[21]:
r_info = 0x046900000007
└── 高32位 = 0x469 = 1129(符号索引)
去 .dynsym[1129] 查找符号
↓
st_name → .dynstr → "malloc"重定位表不直接存符号名,而是通过索引引用符号表。没有 .dynsym,.rela.plt 不知道要重定位哪个符号。
3. .dynamic → .dynstr(sh_link=9)
.dynamic 包含 DT_NEEDED 条目(依赖的 so 名称,如 libc.so),这些字符串存储在 .dynstr 中。
链式查找示例
要找 malloc 的重定位信息,需要按链查找:
1. 从 .rela.plt[21] 出发
↓ sh_link=4
2. 查 .dynsym[1129] 获取符号信息
↓ sh_link=9
3. 查 .dynstr 获取字符串 "malloc"
↓
4. 在 libc.so 中找到 malloc 地址
↓
5. 回填到 GOT[24]为什么这样设计?
避免冗余存储:
- 1000 个符号名,如果每个符号结构体都存 50 字节字符串,需要 50KB
- 用
.dynstr集中存储,.dynsym只需存 4 字节偏移,总共 4KB + 实际字符串长度
分表存储、链式引用是 ELF 的核心设计思想。
2.3 sh_entsize:计算”员工数量”
通过 sh_size / sh_entsize 可以计算表中的条目数量:
.dynsym:
sh_size = 0x8b38 = 35640 bytes
sh_entsize = 24 bytes (Elf64_Sym 大小)
符号数量 = 35640 / 24 = 1485 个符号
.rela.plt:
sh_size = 0x2e08 = 11784 bytes
sh_entsize = 24 bytes (Elf64_Rela 大小)
重定位条目数 = 11784 / 24 = 491 个这个数字校验帮助我们确认解析逻辑的正确性。
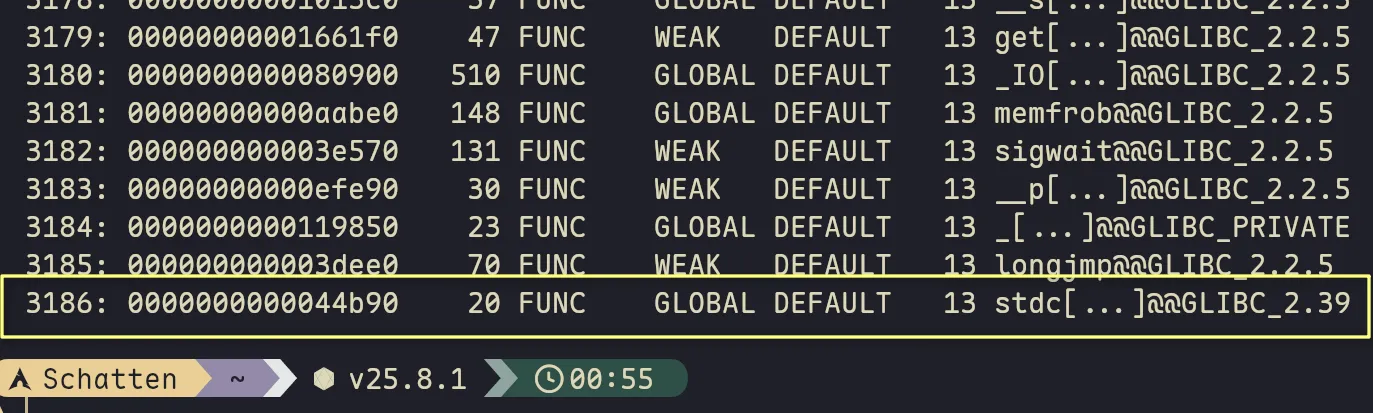
实验一下
大小 == size , 全体大小 == sh_entsize : 计算得到应有 3187 个条目
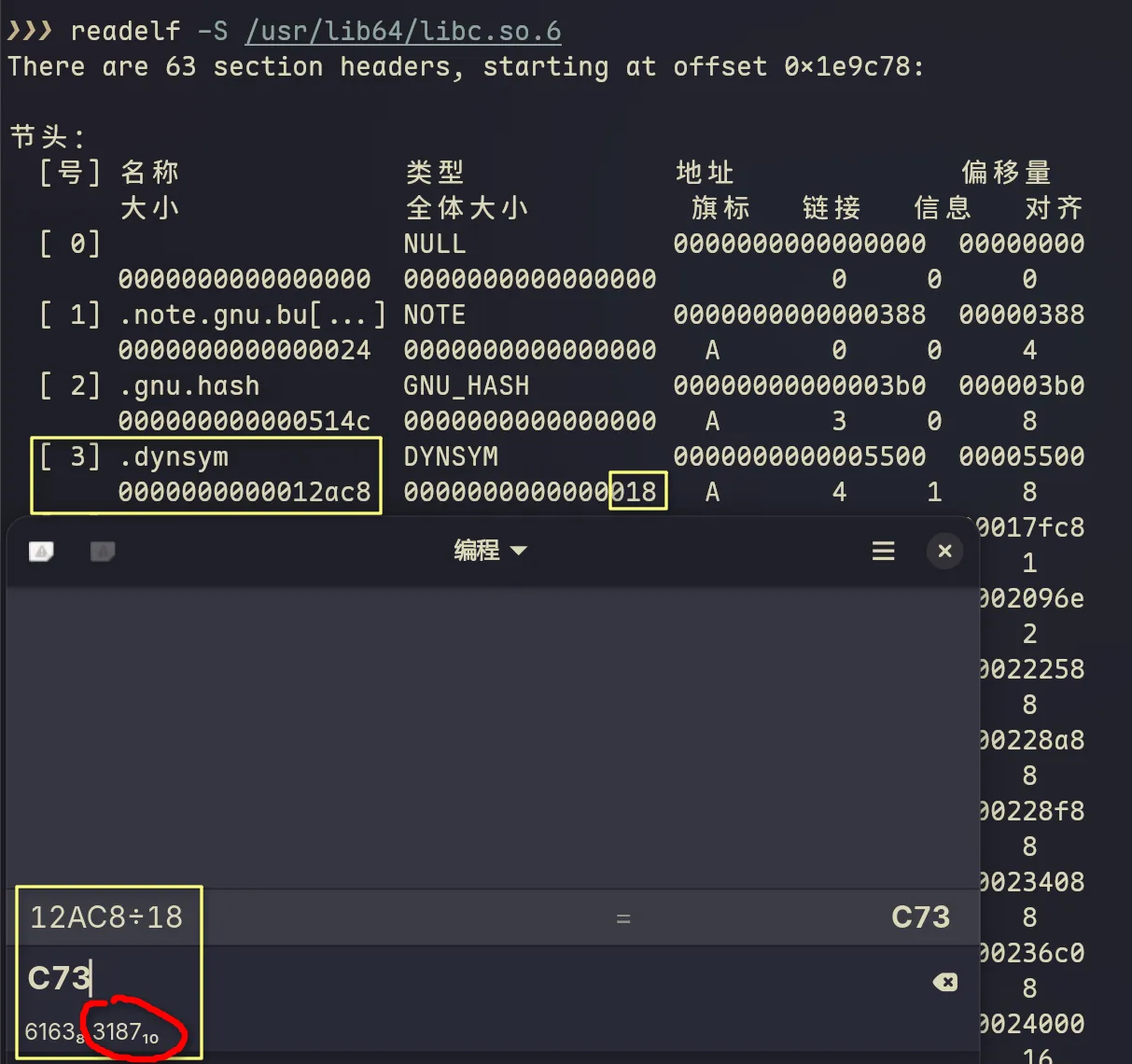
$ readelf --dyn-syms /usr/lib64/libc.so.6最后一条索引: 3186 (索引0条目是占位的, 各字段均为0)
步骤 3:动态符号表与重定位表解析——读懂”人事档案”与”转接指南”
目标:解析 .dynsym 和 .rela.plt,建立”函数名 → GOT 位置”的完整映射
实现文件:
app/src/main/cpp/elf_reader/elf_symbols.h/cppapp/src/main/cpp/elf_reader/elf_relocations.h/cpp预期输出:
- 列出所有动态符号(类似
readelf --dyn-syms)- 列出 PLT 重定位条目(类似
readelf -r)- 建立符号与重定位的关联
3.1 为什么需要解析这两张表?
步骤 2 已经知道 .dynsym 的位置和大小,但还不知道里面存了哪些函数。
数据流关系:
.dynstr(姓名数据库)
↓ st_name 偏移索引
.dynsym(人事档案)
↓ 符号索引(.rela.plt 引用)
.rela.plt(转接指南)
↓ r_offset 指向
.got.plt(电话簿)只有解析了 .dynsym 和 .rela.plt,才能回答:
- “malloc 在符号表的第几个条目?”
- “malloc 的 GOT 槽位是第几个?地址是多少?“
3.2 Elf64_Sym:符号表条目的内存布局
.dynsym section 是一个 Elf64_Sym 结构体数组,每个元素 24 字节:
偏移 | 字段 | 大小 | 含义
-----|-----------|-------|------------------------------------------
0 | st_name | 4字节 | 符号名在 .dynstr 中的字节偏移
4 | st_info | 1字节 | 高4位=bind,低4位=type
5 | st_other | 1字节 | 可见性(通常 0=DEFAULT)
6 | st_shndx | 2字节 | 所在 section 索引(0=未定义外部符号)
8 | st_value | 8字节 | 符号值(外部函数为0,本地函数为偏移)
16 | st_size | 8字节 | 符号大小(函数体字节数)st_info 编码:
bind = st_info >> 4; // 高4位:STB_GLOBAL=1, STB_LOCAL=0, STB_WEAK=2
type = st_info & 0x0f; // 低4位:STT_FUNC=2, STT_OBJECT=1, STT_NOTYPE=0
// 示例:st_info = 0x12
// bind = 0x1 = GLOBAL(全局可见)
// type = 0x2 = FUNC(函数类型)st_shndx 特殊值:
0 (SHN_UNDEF):未定义,需要从其他 so 解析(外部符号)0xfff1 (SHN_ABS):绝对地址,不受重定位影响
⚠️ 32-bit 陷阱:Elf32_Sym 的字段顺序与 64-bit 不同!
// Elf64_Sym: st_name → st_info → st_shndx → st_value → st_size
// Elf32_Sym: st_name → st_value → st_size → st_info → st_shndx
// ↑ 注意这里顺序不同!3.3 代码实现:解析 .dynsym
bool DynamicSymbolTable::parse(const uint8_t* dynsymData, size_t dynsymSize,
const uint8_t* dynstrData, size_t dynstrSize,
bool is64bit, bool isLittleEndian) {
this->dynstrData = dynstrData;
this->dynstrSize = dynstrSize;
size_t entrySize = is64bit ? 24 : 16; // Elf64_Sym vs Elf32_Sym
size_t numSymbols = dynsymSize / entrySize;
for (size_t i = 0; i < numSymbols; i++) {
const uint8_t* entry = dynsymData + i * entrySize;
SymbolInfo sym;
sym.index = i;
// 所有格式:st_name 都在 offset 0
uint32_t st_name = readVal<uint32_t>(entry + 0, isLittleEndian);
if (is64bit) {
// 64-bit 布局:name(4) → info(1) → other(1) → shndx(2) → value(8) → size(8)
uint8_t st_info = readVal<uint8_t>(entry + 4, isLittleEndian);
uint8_t st_other = readVal<uint8_t>(entry + 5, isLittleEndian);
uint16_t st_shndx = readVal<uint16_t>(entry + 6, isLittleEndian);
uint64_t st_value = readVal<uint64_t>(entry + 8, isLittleEndian);
uint64_t st_size = readVal<uint64_t>(entry + 16, isLittleEndian);
sym.bind = st_info >> 4;
sym.type = st_info & 0x0f;
sym.other = st_other;
sym.shndx = st_shndx;
sym.value = st_value; // 注意:使用简化字段名
sym.size = st_size;
} else {
// 32-bit 布局:name(4) → value(4) → size(4) → info(1) → other(1) → shndx(2)
// 注意字段顺序不同!
uint32_t st_value = readVal<uint32_t>(entry + 4, isLittleEndian);
uint32_t st_size = readVal<uint32_t>(entry + 8, isLittleEndian);
uint8_t st_info = readVal<uint8_t>(entry + 12, isLittleEndian);
// ...
}
// 从 .dynstr 读取符号名
if (st_name < dynstrSize) {
sym.name = reinterpret_cast<const char*>(dynstrData + st_name);
}
symbols.push_back(sym);
}
return true;
}3.4 Elf64_Rela:重定位表条目的内存布局
.rela.plt section 是一个 Elf64_Rela 结构体数组,每个元素 24 字节:
偏移 | 字段 | 大小 | 含义
-----|-----------|-------|------------------------------------------
0 | r_offset | 8字节 | 需要被修改的内存地址(即对应 GOT 条目的运行时地址)
8 | r_info | 8字节 | 高32位=符号表索引,低32位=重定位类型
16 | r_addend | 8字节 | 加数(int64_t,JUMP_SLOT 通常为0)r_info 解码:
uint64_t r_info = ...;
uint32_t symIndex = (uint32_t)(r_info >> 32); // 高32位
uint32_t type = (uint32_t)(r_info & 0xffffffff); // 低32位
// .rela.plt 中的类型通常是:
// R_AARCH64_JUMP_SLOT = 1026 = 0x402(PLT 函数跳转)术语速查:重定位类型
类型常量 架构 值 含义 R_AARCH64_JUMP_SLOTARM64 1026 (0x402) PLT 函数跳转槽,需要填充 GOT 条目 R_X86_64_JUMP_SLOTx86_64 7 同上,x86_64 架构版本 R_AARCH64_GLOB_DATARM64 1025 全局数据变量 GOT 条目 R_X86_64_GLOB_DATx86_64 6 全局数据变量 GOT 条目
3.5 rela[n] → GOT[n+3] 的映射关系
理解这个映射关系是掌握延迟绑定的关键。
为什么要有 +3?
GOT(Global Offset Table)是一个指针数组,但前 3 个条目有特殊用途:
| GOT 索引 | 用途 | 说明 |
|---|---|---|
| GOT[0] | .dynamic section 地址 | 指向动态链接信息 |
| GOT[1] | link_map 指针 | 当前 so 的”身份证”,用于动态链接器识别 |
| GOT[2] | _dl_runtime_resolve 地址 | 动态链接器的符号解析函数 |
| GOT[3] | 第 1 个外部函数地址 | 如 malloc |
| GOT[4] | 第 2 个外部函数地址 | 如 free |
| … | … | … |
| GOT[n+3] | 第 n+1 个外部函数地址 | 对应 .rela.plt[n] |
术语速查:GOT(Global Offset Table)
本质:函数指针数组,存放外部符号的运行时地址。
GOT[0]=.dynamicsection 地址GOT[1]=link_map指针(当前 so 的标识)GOT[2]=_dl_runtime_resolve地址(首次调用时的符号解析函数)GOT[3+]= 外部函数的实际地址(延迟绑定,首次调用后才填入真实地址)GOT 为何可写(
W标志)?因为动态链接器需要在运行时更新 GOT[1]、GOT[2] 和 GOT[3+]。
映射公式:
.rela.plt[n] 对应 GOT[n+3]
即:
- rela[0] → GOT[3](第 1 个外部函数)
- rela[1] → GOT[4](第 2 个外部函数)
- rela[n] → GOT[n+3](第 n+1 个外部函数)从 rela 到 GOT 地址的计算
.rela.plt[n].r_offset 字段存储的就是对应 GOT 条目的运行时地址:
r_offset = got_plt_base + (n + 3) * sizeof(void*)
= got_plt_base + (n + 3) * 8 (64-bit 系统)实例验证(使用真实 libc.so 数据):
首先获取必要信息:
# 1. 获取 .got.plt 基址
$ readelf -S libc.so | grep got.plt
[24] .got.plt PROGBITS 00000000000f6e50 000f6e50
# 基址 = 0x00000000000f6e50
# 2. 获取 malloc 在 .rela.plt 中的索引
# .rela.plt 从第 1042 行开始(行号 3 是表头,1041 是重定位节标题)
$ readelf -r libc.so | grep -n malloc
1063:0000000f6f10 046900000007 R_X86_64_JUMP_SLO 00000000000550b0 malloc@@LIBC + 0
# malloc 在第 1063 行,索引 n = 1063 - 1042 = 21(第22个条目)
# 3. 验证 r_offset
# readelf 显示: r_offset = 0x0000000f6f10验证计算:
Step 1: 计算 GOT 索引
GOT 索引 = n + 3 = 21 + 3 = 24
→ malloc 对应 GOT[24]
Step 2: 计算 GOT[24] 的理论地址
GOT[24] 地址 = 0x00000000000f6e50 + 24 × 8
= 0x00000000000f6e50 + 192
= 0x00000000000f6e50 + 0xC0
= 0x00000000000f6f10
Step 3: 与 readelf 输出对比
readelf 显示的 r_offset: 0x0000000f6f10
计算得到的 GOT[24] 地址: 0x00000000000f6f10
结果: ✓ 完全匹配!在 readelf -r 的输出中,你可以直接看到这个对应关系:
$ readelf -r libc.so | grep malloc
0000000f6f10 046900000007 R_X86_64_JUMP_SLO 00000000000550b0 malloc@@LIBC + 0
↑ ↑
GOT[24]地址 符号索引 0x0469 = 1129
→ 指向 .dynsym 第 1129 个符号(即 malloc)一张图看懂映射关系(以 libc.so 中的 malloc 为例)
.rela.plt (重定位表) .got.plt (全局偏移表)
基址: 0x00000000000f6e50
+----------------+ +-------------------------+
| rela[0] |-------------->| GOT[3] 第1个外部函数 |
| r_offset | n+3 | |
+----------------+ +-------------------------+
| rela[1] |-------------->| GOT[4] 第2个外部函数 |
| r_offset | | |
+----------------+ +-------------------------+
| ... | | ... |
+----------------+ +-------------------------+
| rela[21] |-------------->| GOT[24] malloc ◄────────┤
| r_offset ────┘ │ 地址: 0x0f6f10 │
| = 0x0f6f10 │ 验证: │ (基址 + 0xC0) │
| symIdx=1129 ─┤ 21+3=24 ✓ │ 初始: PLT解析代码 │
+----------------+ │ 解析后: 0x550b0 │
+-------------------------+
| ... |
+-------------------------+
│ GOT[2] _dl_runtime_resolve│ ← 保留
│ GOT[1] link_map │ ← 保留
│ GOT[0] .dynamic │ ← 保留
+-------------------------+
验证公式: rela[n].r_offset = got_base + (n + 3) × 8
0x0f6f10 = 0x0f6e50 + 24 × 8 = 0x0f6e50 + 0xC0 ✓GOT 的生命周期与演进
阶段1:编译/链接时(磁盘上的 .so)
GOT[0-2]: 值为 0(占位符,运行时由 linker 填充)
GOT[3+]: 初始指向各自的 PLT 条目(解析代码)阶段2:加载时(System.loadLibrary() 后) 动态链接器立即填充前3项,其余保持不变:
GOT[0] = .dynamic section 地址(内存虚拟地址)
GOT[1] = link_map 指针(当前 so 的"身份证")
GOT[2] = _dl_runtime_resolve 地址(符号解析函数)
GOT[3+] = 仍指向 PLT(未解析状态)阶段3:首次调用时(运行时) 以 malloc(GOT[24])为例:
第1次调用 malloc:
PLT[22] → GOT[24] → 发现是解析代码 → 触发 _dl_runtime_resolve
_dl_runtime_resolve 查找 malloc 真实地址 0x550b0
填充 GOT[24] = 0x550b0
跳转到 malloc 执行
第2次调用 malloc:
PLT[22] → GOT[24](0x550b0) → 直接跳转(快!)
第3+次: 同第2次GOT[0-2] vs GOT[3+] 的关键区别:
| 特性 | GOT[0-2] | GOT[3+] |
|---|---|---|
| 用途 | 动态链接器内部使用 | 存储外部函数地址 |
| 填充时机 | so 加载时(立即) | 首次调用时(延迟绑定) |
| 填充者 | 动态链接器 (linker) | _dl_runtime_resolve |
| 内容 | 元数据(.dynamic, link_map, 解析器) | 函数指针 |
| 变化 | 加载后固定不变 | PLT地址 → 真实地址 |
为什么这个映射很重要?
-
PLT 代码硬编码了这个关系:PLT 条目通过固定的偏移量访问 GOT
# PLT[3](对应 rela[0]/GOT[3]) adrp x16, #<got_page> # 计算 GOT 页基址 ldr x17, [x16, #24] # 加载 GOT[3] 的地址偏移 = 3*8 = 24 br x17 -
Hook 原理基于此:知道函数名 → 查符号表得到索引 → 通过公式计算 GOT 位置 → 修改 GOT 条目
-
延迟绑定的核心:首次调用时 GOT[n+3] 指向 PLT 解析代码,解析后填入真实地址
3.6 代码实现:解析 .rela.plt 并关联符号
bool RelocationTable::parse(const uint8_t* data, size_t size,
bool is64bit, bool isLittleEndian, bool isPLT) {
this->isPLT = isPLT;
size_t entrySize = 24; // Elf64_Rela 固定 24 字节
size_t numEntries = size / entrySize;
for (size_t i = 0; i < numEntries; i++) {
const uint8_t* entry = data + i * entrySize;
RelocationInfo rel;
rel.index = i;
rel.offset = readVal<uint64_t>(entry + 0, isLittleEndian);
rel.info = readVal<uint64_t>(entry + 8, isLittleEndian);
rel.addend = (int64_t)readVal<uint64_t>(entry + 16, isLittleEndian);
// 解码 r_info
rel.symIndex = (uint32_t)(rel.info >> 32);
rel.type = (uint32_t)(rel.info & 0xffffffff);
relocations.push_back(rel);
}
return true;
}
// 建立重定位条目与符号的关联
void RelocationTable::linkSymbols(const DynamicSymbolTable& symtab) {
for (auto& rel : relocations) {
rel.symbol = symtab.findByIndex(rel.symIndex);
// 现在 rel.symbol->name 就是函数名
}
}3.7 测试结果验证
测试命令:
# 推送到设备
adb push app/build/intermediates/cmake/debug/obj/arm64-v8a/elf_reader /data/local/tmp/
adb shell chmod +x /data/local/tmp/elf_reader
# 运行测试
adb shell /data/local/tmp/elf_reader /system/lib64/libc.so验证 1:函数符号数量
# 我们的工具
adb shell /data/local/tmp/elf_reader /system/lib64/libc.so 2>&1 | grep -c FUNC
# 结果:1448
# GNU readelf(电脑上)
readelf --dyn-syms /system/lib64/libc.so | grep FUNC | wc -l
# 结果:1448 ✅ 一致验证 2:malloc 的重定位信息
PLT relocations (function jumps):
Entry Offset GOT Index Symbol
[ 21] 00000000000f6f78 [ 24] malloc
解读:
- rela.plt 第 21 个条目对应 malloc
- 该条目指向 GOT[24](21 + 3 = 24)
- GOT[24] 的运行时地址是 0xf6f783.8 从数据到洞察:我们学到了什么?
通过步骤 3 的实现,我们真正读懂了 so 文件的”人事档案”和”转接指南”:
-
符号表是字典:通过
.dynsym+.dynstr,我们知道”第21号员工叫 malloc” -
重定位表是地图:通过
.rela.plt,我们知道”malloc 的电话号码存在 GOT[24]” -
延迟绑定的实现基础:
- GOT[0-2] 保留给动态链接器
- GOT[3+] 存放外部函数地址
- 首次调用时,GOT 条目指向 PLT 解析代码
- 解析完成后,GOT 条目被改写为真实地址
-
Hook 的原理:
- GOT 是可写的(
W标志) - 修改 GOT[n] = 替换函数实现
- ByteHook 正是利用这一点
- GOT 是可写的(
本篇总结
本篇(基础结构篇)完成了 ELF Reader 的前三个核心解析功能:
| 步骤 | 功能 | CLI 参数 | 关键成果 |
|---|---|---|---|
| 步骤 1 | ELF Header 解析 | -h | 识别文件类型、架构、字节序,定位 Section Header |
| 步骤 2 | Section Header 解析 | -S | 识别关键 section(.dynsym, .rela.plt, .got.plt 等) |
| 步骤 3 | 动态符号表+重定位表 | -s / -r | 建立”函数名 → GOT 位置”映射,理解延迟绑定机制基础 |
核心收获:
- ELF 采用分表存储、链式引用设计:.dynsym 引用 .dynstr,.rela.plt 引用 .dynsym
- GOT 是动态链接的核心数据结构,GOT[3+] 存放外部函数地址
- rela[n] → GOT[n+3] 的映射关系,是理解延迟绑定和 PLT Hook 的基础
下一步:02_动态链接篇 将深入分析 .dynamic 段、运行时内存布局,以及延迟绑定的完整调用流程。