ELF 学习笔记 02:动态链接篇
本系列笔记记录 ELF Reader 开发过程中的学习心得,从代码实践中理解 ELF 文件结构和动态链接机制。
系列导航:
前置知识:本篇依赖 01_基础结构篇 中建立的概念:Section 结构、.dynsym/.rela.plt 数据流、GOT 基本原理。
步骤 4:.dynamic 段解析——依赖库的”清单”
目标:解析 .dynamic 段,提取依赖库列表(DT_NEEDED)和其他动态链接元数据
实现文件:
app/src/main/cpp/elf_reader/elf_dynamic.h/cpp(新建)- 修改
main.cpp添加 -d 参数支持
4.1 什么是 .dynamic 段?
.dynamic 是动态链接的”元数据中心”。如果把 so 文件比作一份简历,.dynamic 就是简历顶部的基本信息:
| 字段 | 作用 | 示例值 |
|---|---|---|
| DT_NEEDED | 依赖的其他 so 文件 | libc.so, libm.so |
| DT_SONAME | 当前 so 自己的名字 | libc.so.6 |
| DT_SYMTAB | 动态符号表 (.dynsym) 地址 | 内存地址 |
| DT_STRTAB | 动态字符串表 (.dynstr) 地址 | 内存地址 |
| DT_HASH | 符号哈希表地址(加速查找) | 内存地址 |
| DT_GNU_HASH | GNU 哈希表地址(更高效的查找) | 内存地址 |
简单说:动态链接器通过读取 .dynamic,就能知道”这个 so 需要哪些库、符号表在哪里、怎么快速查找符号”。
4.2 Elf64_Dyn 结构
.dynamic 是一个 Elf64_Dyn 结构体数组,每个元素 16 字节:
偏移 | 字段 | 大小 | 含义
-----|-----------|-------|------------------------------------------
0 | d_tag | 8字节 | 条目类型(DT_NEEDED, DT_SONAME 等)
8 | d_un | 8字节 | 联合体:d_val(整数值)或 d_ptr(地址)d_tag 决定 d_un 如何解释:
- DT_NEEDED: d_un.d_val 是 .dynstr 中的偏移(字符串索引)
- DT_SONAME: d_un.d_val 是 .dynstr 中的偏移(字符串索引)
- DT_SYMTAB: d_un.d_ptr 是内存地址
- DT_HASH: d_un.d_ptr 是内存地址
4.3 d_tag 常量定义
// 关键 d_tag 值
DT_NULL = 0, // 标记数组结束
DT_NEEDED = 1, // 需要的共享库(字符串表偏移)
DT_PLTRELSZ = 2, // PLT 重定位表大小
DT_PLTGOT = 3, // PLT/GOT 地址
DT_HASH = 4, // 符号哈希表地址
DT_STRTAB = 5, // 动态字符串表地址
DT_SYMTAB = 6, // 动态符号表地址
DT_RELA = 7, // RELA 重定位表地址
DT_RELASZ = 8, // RELA 重定位表大小
DT_RELAENT = 9, // RELA 条目大小
DT_STRSZ = 10, // 字符串表大小
DT_SYMENT = 11, // 符号表条目大小
DT_INIT = 12, // 初始化函数地址
DT_FINI = 13, // 终止函数地址
DT_SONAME = 14, // 共享对象名称(字符串表偏移)
DT_RPATH = 15, // 库搜索路径(已废弃)
DT_SYMBOLIC = 16, // 符号解析标志
DT_REL = 17, // REL 重定位表地址
DT_RELSZ = 18, // REL 重定位表大小
DT_RELENT = 19, // REL 条目大小
DT_PLTREL = 20, // PLT 重定位类型(REL/RELA)
DT_DEBUG = 21, // 调试用
DT_TEXTREL = 22, // 文本段重定位标志
DT_JMPREL = 23, // PLT 重定位表地址(.rela.plt)
DT_BIND_NOW = 24, // 立即绑定标志
DT_INIT_ARRAY = 25, // 构造函数指针数组
DT_FINI_ARRAY = 26, // 析构函数指针数组
DT_INIT_ARRAYSZ = 27, // 构造函数数组大小
DT_FINI_ARRAYSZ = 28, // 析构函数数组大小
DT_RUNPATH = 29, // 库搜索路径(替代 RPATH)
DT_FLAGS = 30, // 标志位
DT_GNU_HASH = 0x6ffffef5, // GNU 哈希表地址4.4 代码实现
DynamicEntry 结构体
struct DynamicEntry {
uint32_t index; // 在数组中的索引
uint64_t tag; // d_tag
uint64_t value; // d_un.d_val(整数值)
uint64_t ptr; // d_un.d_ptr(地址)
// 判断 d_un 是值还是指针
bool isValue() const {
// 这些 tag 使用 d_val(整数值或字符串偏移)
return tag == DT_NEEDED || tag == DT_PLTRELSZ || tag == DT_RELASZ ||
tag == DT_RELAENT || tag == DT_STRSZ || tag == DT_SYMENT ||
tag == DT_SONAME || tag == DT_RPATH || tag == DT_RELSZ ||
tag == DT_RELENT || tag == DT_PLTREL || tag == DT_INIT_ARRAYSZ ||
tag == DT_FINI_ARRAYSZ || tag == DT_RUNPATH || tag == DT_FLAGS;
}
bool isPointer() const {
return !isValue() && tag != DT_NULL;
}
};DynamicTable 类
class DynamicTable {
public:
std::vector<DynamicEntry> entries;
std::vector<const DynamicEntry*> neededLibs; // DT_NEEDED 条目指针
const DynamicEntry* soname = nullptr; // DT_SONAME 条目
const DynamicEntry* symtab = nullptr; // DT_SYMTAB
const DynamicEntry* strtab = nullptr; // DT_STRTAB
const DynamicEntry* hash = nullptr; // DT_HASH
const DynamicEntry* gnuHash = nullptr; // DT_GNU_HASH
const DynamicEntry* jmprel = nullptr; // DT_JMPREL (.rela.plt)
const DynamicEntry* rela = nullptr; // DT_RELA (.rela.dyn)
bool parse(const uint8_t* data, size_t size,
bool is64bit, bool isLittleEndian);
void print() const; // 打印所有条目
void printNeededLibs() const; // 只打印依赖库
static const char* getTagName(uint64_t tag);
};4.5 依赖库列表的意义
当运行一个可执行文件时,动态链接器(/system/bin/linker64 或 ld-linux.so)的工作流程:
1. 加载可执行文件
2. 读取其 .dynamic 段
3. 找到所有 DT_NEEDED 条目
4. 递归加载每个依赖库
5. 对每对(加载的 so,其依赖库)执行符号解析和重定位这正是我们实现 so 跳转分析的基础——只有理解了依赖关系,才能知道函数调用的目标库。
4.6 测试验证
# 查看 libc.so 的依赖
adb shell /data/local/tmp/elf_reader -d /system/lib64/libc.so
# 预期输出(Android libc 通常没有依赖)
# Dynamic Section (.dynamic):
# 依赖库列表 (DT_NEEDED):
# [无]
#
# SONAME: libc.so
# 符号表地址: 0x...
# 字符串表地址: 0x...
# ...步骤 4 已完成:.dynamic 段解析实现
elf_dynamic.h/cpp创建DynamicTable类实现-d参数支持打印依赖库列表- main.cpp 集成
步骤 5:PT_LOAD 段信息——运行时内存布局
目标:解析 Program Header Table,识别 PT_LOAD 段,理解运行时内存映射
实现文件:
app/src/main/cpp/elf_reader/elf_segments.h/cpp(新建)- 修改
main.cpp添加 -l/—segments 参数支持
5.1 Segment vs Section 的区别
这是理解 ELF 的关键概念:
| 特性 | Section | Segment |
|---|---|---|
| 用途 | 链接时组织数据 | 运行时内存映射 |
| 粒度 | 细粒度(.text, .data, .rodata 等) | 粗粒度(代码段、数据段) |
| 数量 | 通常 20-30 个 | 通常 3-5 个 |
| 关系 | 多个 section 可以合并到一个 segment | 一个 segment 包含多个 section |
运行时视角:操作系统只关心 Segment,不关心 Section。
5.2 PT_LOAD 段的类型
┌─────────────────────────────────────────────┐
│ PT_LOAD [R-E] 代码段 │ ← .text, .plt, .init, .fini
│ 虚拟地址: 0x1000 │
│ 权限: 可读(R) + 可执行(E) │
│ 特点: 不可写(防止代码被篡改) │
└─────────────────────────────────────────────┘
┌─────────────────────────────────────────────┐
│ PT_LOAD [RW-] 数据段 │ ← .data, .bss
│ 虚拟地址: 0x2000 │
│ 权限: 可读(R) + 可写(W) │
│ 特点: 不可执行(防止数据被执行) │
│ 注意: 内存大小 >= 文件大小(.bss 扩展) │
└─────────────────────────────────────────────┘
┌─────────────────────────────────────────────┐
│ PT_LOAD [R--] 只读数据段 │ ← .rodata, .eh_frame
│ 虚拟地址: 0x3000 │
│ 权限: 只读(R) │
│ 特点: 常量字符串、只读数据 │
└─────────────────────────────────────────────┘5.3 Elf64_Phdr 结构
struct Elf64_Phdr {
uint32_t p_type; // 段类型(PT_LOAD=1)
uint32_t p_flags; // 标志(PF_R=4, PF_W=2, PF_X=1)
uint64_t p_offset; // 文件偏移
uint64_t p_vaddr; // 虚拟地址(运行时)
uint64_t p_paddr; // 物理地址(通常忽略)
uint64_t p_filesz; // 文件大小
uint64_t p_memsz; // 内存大小(>= 文件大小)
uint64_t p_align; // 对齐要求
};5.4 内存大小 vs 文件大小
文件中的布局: 内存中的布局:
+------------+ +------------+
| .text | | .text |
| 0-1000 | | 0-1000 |
+------------+ +------------+
| .data | | .data |
| 1000-2000 | | 1000-2000 |
+------------+ +------------+
| .bss | | .bss |
| (不占空间) | | 2000-3000 | ← 零初始化
+------------+ +------------+
.bss 段:未初始化的全局变量
- 文件中不占空间(节省磁盘)
- 加载时分配内存并清零
- 所以 p_memsz > p_filesz5.5 代码实现
class ProgramHeaderTable {
public:
std::vector<SegmentInfo> segments;
std::vector<const SegmentInfo*> loadSegments;
bool parse(const uint8_t* data, size_t size,
uint64_t phoff, uint16_t phnum, uint16_t phentsize,
bool is64bit, bool isLittleEndian);
void print() const; // 打印所有段
void printLoadSegments() const; // 只打印 PT_LOAD
};5.6 测试验证
adb shell /data/local/tmp/elf_reader -l /system/lib64/libc.so预期输出:
PT_LOAD 段 (运行时内存映射):
序号 | 虚拟地址 | 文件偏移 | 文件大小 | 内存大小 | 权限 | 用途
-----|--------------------|----------|----------|----------|------|----------
[ 0] | 0x0000000000000000 | 0x000000 | 0x0b3ca0 | 0x0b3ca0 | R E | 代码段 (.text)
[ 1] | 0x00000000000b4000 | 0x0b4000 | 0x002298 | 0x0022a0 | RW- | 数据段 (.data/.bss)
[ 2] | 0x00000000000d7000 | 0x0d62a0 | 0x00f5b8 | 0x00f5b8 | R-- | 只读数据 (.rodata)步骤 5 已完成:
elf_segments.h/cpp创建ProgramHeaderTable类实现-l/--segments参数支持- PT_LOAD 段识别和打印
理论深入:延迟绑定机制详解——以 malloc 为例
前置知识:本节需要理解
.dynsym、.rela.plt、.got.plt三个节的协作关系。我们将揭示编译器、链接器、动态链接器如何精密配合,完成一次跨 SO 的函数调用。阅读完步骤 4(.dynamic)和步骤 5(PT_LOAD)之后,我们已经了解了 so 文件的静态结构:依赖库、内存布局。现在来看这些结构在运行时如何协作,完成一次跨 so 的函数调用。
前后呼应:本节涉及的 PLT 代码会在步骤 6 中通过反汇编验证,届时可以对照本节的机制描述。
阶段一:编译期(制造”外交手册”)
场景:你正在开发 libgame.so,代码里写了一行:
void* ptr = malloc(100); // 向 libc.so 申请 100 字节内存[1] 编译器(生成.o)
编译器看到 malloc,但不知道它在哪里(外部符号),于是:
- 生成占位符:在
.o文件中标记”此处需要外部符号 malloc” - 创建 PLT 条目:链接器生成一个”前台转接处”代码片段
# 编译器生成的汇编(game.o 内部)
call malloc # 生成 R_X86_64_PLT32 重定位记录
# 意思:"此处需要调用外部符号 malloc,请链接器安排"此时:编译器不知道 malloc 在 PLT 的第几个条目,只知道”这是个外部函数”。
[2] 链接器 (生成.so)
链接器组装 libgame.so 时,创建三套关键表格:
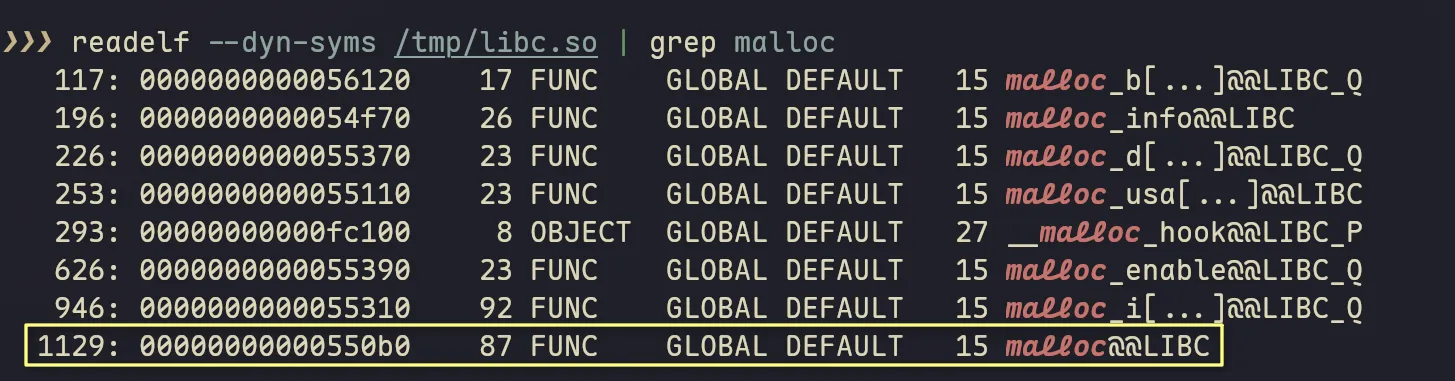
📋 表格 1:.dynsym(人事档案部)
索引 | 姓名偏移 | 类型 | 绑定 | 所在部门
-----|----------|--------|--------|----------
... | ... | ... | ... | ...
1129 | 0x1234 | FUNC | GLOBAL | UNDEF ← malloc,未定义(外部符号)
... | ... | ... | ... | ...st_name = 0x1234:在.dynstr中的偏移,对应字符串 “malloc”st_info = 0x12:bind=1(GLOBAL, 全局可见)+type=2(FUNC, 函数)st_shndx = 0(SHN_UNDEF):外部符号,需要运行时从其他 so 解析
📒 表格 2:.rela.plt(转接指南)
索引 | GOT偏移(r_offset) | 符号索引(r_info高32位) | 类型(r_info低32位)
-----|-------------------|------------------------|-------------------
21 | 0xf6f10 | 1129 (0x469) | 7 (X86_64_JUMP_SLOT)字段解析(以 libc.so 中的 malloc 为例):
r_offset = 0xf6f10:对应 GOT[24] 的运行时地址(基址 0xf6e50 + 24×8)r_info = 0x046900000007(64位字段):- 高32位 = 0x469 = 1129:指向 .dynsym[1129](即 malloc 符号)
- 低32位 = 0x7 = 7:重定位类型
R_X86_64_JUMP_SLOT
- 含义:告诉动态链接器 “请把 .dynsym[1129] 对应函数的地址填入 GOT[24]”
验证: 0x0469 确实对应上了 .dynsym[1129]
📇 表格 3:.got.plt(电话簿)
存储外部函数的实际地址。编译时初始指向 PLT 解析代码,首次调用后被填充为真实地址。
链接器收集所有外部函数,按出现顺序分配 PLT/GOT 资源。假设链接顺序是:
printf→ PLT[1],GOT[3],Rela[0]fprintf→ PLT[2],GOT[4],Rela[1]malloc→ PLT[3],GOT[5],Rela[2]
链接器执行的操作
-
重写指令:把
call malloc改为call PLT[3](计算为相对跳转偏移) -
创建 PLT[3] 代码(16 字节):
PLT[3]: jmp *GOT[5] # 跳转到 GOT[5] 存储的地址 pushq $2 # 压入重定位索引 2(对应 .rela.plt[2]) jmp PLT[0] # 跳转到总服务台 -
填写 .rela.plt[2]:
r_offset = GOT[5] 的地址(告诉 linker 填哪个位置)r_info = 0x46900000007(高32位是 dynsym 索引 1129,低32位是类型 7)
-
预留 GOT[5]:初始值指向 PLT[3] 的第二条指令(push $2)
验证关系:
- PLT[3] 对应 第3个函数(N=3)
- 对应 GOT[3+2] = GOT[5](跳过前3个保留项)
- 对应 Rela[3-1] = Rela[2](从0开始计数)
PLT 是什么?
术语速查:PLT(Procedure Linkage Table,过程链接表)
每个外部函数对应一个 PLT 条目(16字节),是”前台转接代码”。作用:
- 首次调用时,触发动态链接器解析真实地址
- 后续调用,直接从 GOT 读取已解析的地址跳转
PLT[0] 是”总服务台”,负责调用动态链接器;PLT[n+1] 是第 n 个外部函数的条目。
关键索引对照表
为避免混淆,先明确三个不同维度的索引:
| 维度 | 范围/说明 | 与 PLT[N] 的关系(N≥1) |
|---|---|---|
| PLT 条目 | PLT[0] 是总服务台,PLT[1+] 是函数 | 自身 |
| GOT 索引 | GOT[0-2] 保留给 linker,GOT[3+] 给函数 | GOT[N+2] |
| 重定位索引 | .rela.plt 数组索引,从 0 开始 | Rela[N-1] |
记忆口诀:PLT 从 1 开始算,GOT 加 2,Rela 减 1。
阶段二:运行时首次调用(延迟绑定)
现在程序运行,首次执行 call malloc@plt:
[1] 呼叫前台(进入 PLT)
call malloc@plt
# 实际上跳转到 PLT[3](链接时已计算好的相对偏移)[2] 查电话簿(首次失败)
PLT[3] 第一条指令执行:
jmp *GOT[5] # 查看 GOT[5] 的内容此时 GOT[5] 的值:链接器预设的 PLT[3] 第二条指令地址(即 pushq $2 的地址)。
这是一个陷阱:CPU 发现跳转目标就是下一条指令,于是回到 PLT[3] 继续执行。
[3] 触发查号服务
PLT[3] 继续执行:
pushq $2 # 压入重定位索引 2(对应 .rela.plt[2])
jmp PLT[0] # 跳转到总服务台为什么是 $2?
- 这是链接器硬编码在 PLT 条目中的常量
- 对应
.rela.plt数组的第 2 个元素(从0开始) - 动态链接器通过这个数字知道:“我要查 .rela.plt[2],里面存了 malloc 的信息”
[4] 万能查号(_dl_runtime_resolve 执行)
PLT[0](总服务台)代码:
PLT[0]:
pushq GOT[1] # 压入 link_map(当前 so 的"身份证")
jmp *GOT[2] # 跳转到 _dl_runtime_resolve(动态链接器的查号函数)_dl_runtime_resolve 执行流程:
- 接收参数:
%rdi= GOT[1](link_map,包含 libgame.so 的基址和符号表位置)%rsi= 2(重定位索引,刚从 PLT[3] push 来的)
- 查重定位表:
- 读取
.rela.plt[2]→ 得到sym_idx = 1129,type = R_X86_64_JUMP_SLOT
- 读取
- 查符号表:
- 读取
.dynsym[1129]→ 得到st_name = 0x1234(指向 “.dynstr” 中的 “malloc”)
- 读取
- 全局查找:
- 遍历已加载的 so(libc.so 等),找到符号 “malloc”
- 假设找到地址:
0x7f4567001234
- 回填电话簿:
- 将
0x7f4567001234写入 GOT[5] - 清空指令缓存(确保 CPU 看到新值)
- 将
- 跳转执行:
- 跳转到
0x7f4567001234(真正的 malloc)
- 跳转到
[5] 执行与返回
- malloc 执行完毕,通过栈上的返回地址(call 时压入的)跳回 libgame.so 的调用处
- 后续调用:直接从 GOT[5] 读取
0x7f4567001234,不再经过 PLT[0]
索引关系总结
对于第 N 个外部函数(N ≥ 1):
| 项目 | 计算公式 | malloc 示例(假设是第3个外部函数) |
|---|---|---|
| PLT 条目 | PLT[N] | PLT[3] |
| GOT 索引 | GOT[N + 2] | GOT[5](跳过 [0][1][2] 保留项) |
| 重定位索引 | N - 1 | 2(.rela.plt[2]) |
| dynsym 索引 | 由 r_info 高32位指定 | 1129(示例值,依文件而异) |
反汇编验证:
PLT[3]: jmp *0x92fa(%rip) # 验证:确实是跳转到 GOT[5]
pushq $2 # 验证:压入重定位索引 2
jmp PLT[0]阶段四:后续调用(直通热线)
第二次调用 malloc:
call malloc@plt # 进入 PLT[3]
jmp *GOT[5] # 直接读到 0x7f4567001234,跳转!耗时对比:
- 首次:~100-200 个时钟周期(查符号表、哈希计算)
- 后续:~5 个时钟周期(一次内存读取+跳转)
步骤 6:PLT 反汇编——看清”前台转接处”的真实代码
本节通过反汇编 ARM64/x86_64 指令,验证延迟绑定机制详解所描述的 PLT→GOT 跳转逻辑。
目标:实现 ARM64 指令解码,查看 .plt section 中的实际机器指令
实现文件:
app/src/main/cpp/elf_reader/elf_plt.h/cpp(新建)- 修改
main.cpp添加-D/--disassemble参数支持
6.1 PLT 条目的真实代码
通过解码 PLT 指令,可以直接看到延迟绑定机制的实现细节:
ARM64 PLT 条目(每个外部函数 16 字节,4 条指令):
# PLT 条目(每个外部函数 16 字节,4 条指令)
adrp x16, #<page> # 计算 GOT 页基址
ldr x17, [x16, #<off>] # 从 GOT[n] 加载函数地址
add x16, x16, #<off> # x16 = &GOT[n]
br x17 # 跳转到目标函数x86_64 PLT 条目:
# x86_64:jmp [rip+offset] 相对寻址
jmp *[rip + <offset>] # 从 GOT 加载并跳转
push $<reloc_index> # 首次:压入重定位索引
jmp PLT[0] # 跳到总服务台通过解码这些指令,我们可以:
- 验证 PLT-GOT 对应关系:从指令中提取 GOT 偏移,计算 GOT 索引,与
.rela.plt中的r_offset对比(结果 100% 一致) - 理解位置无关代码(PIC)的实现:
adrp+ldr是 ARM64 的 PC 相对寻址 - 直观看到 PLT 条目如何读取和跳转 GOT
步骤 6 已完成:
elf_plt.h/cpp创建- ARM64/x86_64 指令解码
- GOT 索引计算验证(与 readelf -r 输出 100% 一致)
-D/--disassemble参数支持
步骤 7:.rela.dyn 解析——数据重定位
目标:实现 .rela.dyn 的解析,与 .rela.plt 并列显示
7.1 .rela.plt vs .rela.dyn 的区别
| 特性 | .rela.plt | .rela.dyn |
|---|---|---|
| 用途 | 函数跳转(PLT) | 全局变量/数据访问 |
| 类型 | JUMP_SLOT | GLOB_DAT, ABS64, RELATIVE |
| 触发时机 | 函数调用时 | 模块加载时 |
| 目标 | GOT 表项填充 | 全局变量地址填充 |
举个例子:
// 外部全局变量
extern int errno;
void foo() {
errno = 0; // 访问外部全局变量
}errno 的重定位信息在 .rela.dyn 中,类型是 R_X86_64_GLOB_DAT 或 R_AARCH64_GLOB_DAT。
7.2 实现代码
// main.cpp 中同时解析两者
RelocationTable relaPlt; // PLT 重定位(函数)
RelocationTable relaDyn; // 数据重定位(全局变量)
if (sections.relaPltSection) {
relaPlt.parse(..., true, ...); // isPLT = true
}
if (sections.relaDynSection) {
relaDyn.parse(..., false, ...); // isPLT = false
}
// 打印时分别显示
if (options.showRelocs) {
if (!relaPlt.relocations.empty()) {
relaPlt.printRelocations(); // 标题显示 .rela.plt
}
if (!relaDyn.relocations.empty()) {
relaDyn.printRelocations(); // 标题显示 .rela.dyn
}
}步骤 7 已完成:
main.cpp同时解析 .rela.plt 和 .rela.dyn-r参数打印两种重定位表isPLT标志区分两种类型
步骤 8:.rodata 解析——字符串常量提取
目标:解析 .rodata 节,提取并打印字符串常量
实现文件:
app/src/main/cpp/elf_reader/elf_rodata.h/cpp(新建)- 修改
main.cpp添加-R/--rodata参数支持
8.1 什么是 .rodata?
.rodata = Read-Only Data(只读数据)
存放以下内容:
- 字符串常量:
printf("hello")中的"hello" - 只读数组:
const int table[] = {1, 2, 3} - 编译时常量:类型信息、虚函数表等
步骤 8 已完成:
elf_rodata.h/cpp创建- 空终止字符串扫描、可打印字符过滤
-R/--rodata参数支持
修复记录
修复1:Android 特定 DT 标签显示
问题:DT_OS/PROC(0x6ffffffb) 显示不友好
解决:添加 Android 特定标签识别:
DT_FLAGS_1 = 0x6ffffffb→ 扩展标志位DT_VERNEED = 0x6ffffffe→ 版本需求DT_VERNEEDNUM = 0x6fffffff→ 版本需求数量DT_ANDROID_REL/RELSZ/RELA/RELASZ = 0x60000001-04→ Android 重定位
修复2:PT_LOAD 段用途识别
问题:两个数据段都显示为”.data/.bss”,无法区分
解决:根据 filesz vs memsz 关系判断:
filesz == memsz: 纯 .datafilesz < memsz: .data + .bss(或纯 .bss 如果 filesz==0)filesz == 0: BSS 段(零初始化)
本篇总结
本篇(动态链接篇)完成了 ELF Reader 的核心动态链接解析功能:
| 步骤 | 功能 | CLI 参数 | 关键成果 |
|---|---|---|---|
| 步骤 4 | .dynamic 段解析 | -d | 提取依赖库列表、SONAME、符号表地址 |
| 步骤 5 | PT_LOAD 段信息 | -l | 识别代码段(R-E)、数据段(RW-)、只读数据段(R—) |
| 理论深入 | 延迟绑定机制详解 | — | 理解 malloc 完整调用流程(编译→加载→首次调用→后续调用) |
| 步骤 6 | PLT 反汇编 | -D | 验证 PLT-GOT 对应关系,ARM64/x86_64 指令解码 |
| 步骤 7 | .rela.dyn 解析 | -r | 区分函数重定位(.rela.plt)与数据重定位(.rela.dyn) |
| 步骤 8 | .rodata 解析 | -R | 提取字符串常量 |
核心收获:
- 延迟绑定是一个完整的协作机制:.dynamic(元数据)+ .rela.plt(映射表)+ GOT(地址表)+ PLT(跳转代码)+ _dl_runtime_resolve(解析器)
- PLT 反汇编可以直接验证 rela[n] → GOT[n+3] 映射关系
- 数据重定位(.rela.dyn)与函数重定位(.rela.plt)在触发时机和类型上有本质区别
下一步:03_高级解析篇 将解析 .eh_frame(C++ 异常处理帧)和 DWARF 调试信息。